Para empezar, la robótica puede definirse como la ciencia que se encarga de diseñar sistemas que ejecuten actividades o trabajos los cuales son propios de los seres humanos. Según Isaac Asimov “robótica” es el término que define la tecnología de los robots, ahora, la robótica puede definirse desde muy diversos puntos de vista.
Es evidente que, los robots son difíciles de definir, sin embargo y de una forma muy general, podemos decir que un robot es una máquina que realiza diversas actividades, obedeciendo un programa que le ha sido establecido, y que además imita al ser humano en ciertas características o acciones como por ejemplo moverse.
Por otro lado, se conocen distintos tipos de robots; estos se identifican por sus funciones, de acuerdo a la tecnología que le haya sido incorporada y para qué fueron diseñados, ahora bien, podemos destacar los robots androides que son los mas parecidos a los humanos y actúan como ellos mismos, también resaltan los robots industriales los cuales realizan automáticamente trabajos de manipulación y fabricación, entre otros.
Por otra parte, la robótica por ser una tecnología relativamente nueva, ha generado gran impacto en los diferentes ámbitos a los cuales los seres humanos nos encontramos vinculados, ya sea en el campo laboral, social, competitivo e incluso en la educación; debido a que la robótica combina todas las disciplinas y ciencias afines.
Asimismo, la robótica ha despertado intereses que desbordan cualquier perspectiva y es una ciencia multidisciplinar que utiliza los recursos de otras ciencias que hacen parte de su estructura como la electrónica, la informática, la mecánica, entre otros; así la robótica brinda un diverso campo de trabajo ya sea a profesionales como a investigadores, debido a que es un espacio con muchos objetivos.
En conclusión, la ciencia y la tecnología de la robótica ha causado un gran estallido en el desarrollo y en el uso de los robots con el propósito de facilitarle diversas actividades al ser humano y ha sido tan aceptada la robótica en distintos campos, que se ha llegado a hablar de la “era de los robots”.
¿Qué es la robótica?:
 La robótica es la ciencia encaminada a diseñar y construir aparatos y sistemas capaces de realizar tareas propias de un ser humano.
La robótica es la ciencia encaminada a diseñar y construir aparatos y sistemas capaces de realizar tareas propias de un ser humano.
Con esta definición tan general, la palabra 'robótica' cubre muchos conceptos diferentes, pero todos giran en torno a la misma idea.
Robots Físicos
Robótica Industrial: Es la parte de la Ingeniería que se dedica a la construcción de máquinas capaces de realizar tareas mecánicas y repetitivas de una manera muy eficiente y con costes reducidos.
Robótica de Servicio: Es la parte de la Ingenieria que se centra en el diseño y construcción de máquinas capaces de proporcionar servicios directamente a los miembros que forman sociedad.
Robótica Inteligente: Son robots capaces de desarrollar tareas que, desarrolladas en un ser humano, requieren el uso de su capacidad de razonamiento.
Robótica Humanoide: Es la parte de la ingeniería que se dedica al desarrollo de sistemas robotizados para imitar determinadas pecualiaridades del ser humano.
Robots Software
 Robótica de Exploración: Es la parte de la Ingenieria del Software que se encarga de desarrollar programas capaces de explorar documentos en busca de determinados contenidos. Existen diversos servicios en Internet dedicados a esta parcela de la robótica.
Robótica de Exploración: Es la parte de la Ingenieria del Software que se encarga de desarrollar programas capaces de explorar documentos en busca de determinados contenidos. Existen diversos servicios en Internet dedicados a esta parcela de la robótica.
ARQUITECTURAS DE LOS ROBOTS
La arquitectura, definida por el tipo de configuración general del robot, puede se metamórfica. El concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un robot a través del cambio de su configuración por el propio robot.
El metamorfismo admite diversos niveles, desde los más elementales -cambio de herramienta o de efector terminal-, hasta los más complejoscomo el cambio o alteración de algunos de sus elementos o subsistemas estructurales.
Los dispositivos y mecanismos que pueden agruparse bajo la denominación genérica del robot, tal como se ha indicado, son muy diversos y es por tanto difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso.
La subdivisión de los robots, con base en su arquitectura, se hace en los siguientes grupos: Poliarticulados, Móviles, Androides, Zoomórficos e Híbridos.
POLIARTICULADOS
 Bajo este grupo están los robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios *aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados* y estar estructurados para mover sus elementos terminales en un determinaado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad". En este grupo se encuentran los manipuladores, los robots industriales, los robots cartesianos y algunos robots industriales y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o deucir el espacio ocupado en el suelo.
Bajo este grupo están los robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios *aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados* y estar estructurados para mover sus elementos terminales en un determinaado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad". En este grupo se encuentran los manipuladores, los robots industriales, los robots cartesianos y algunos robots industriales y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o deucir el espacio ocupado en el suelo.MÓVILES
Son robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores. Las tortugas motoriza das diseñadas en los años ciencuentas, fueron las precursoras y sirvieron de base a los estudios sobre inteligencia artificial desarrollados entre 1965 y 1973 en la Universidad de Stranford.
Estos robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctr icamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
ANDROIDES
Son robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación.
Uno de los aspectos más complejos de estos robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del robot .
ZOOMÓRFICOS
Los robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los robots zoomórficos en dos categorías principales: caminadores y no aminadores.
El grupo de los robots zoomórficos no caminadores está muy poco evolu cionado. Cabe destacar, entre otros, los experimentados efectuados en Japón basados en segmentos cilíndricos biselados acoplados axialmente entre sí y dotados de un movimiento relativo de rotación. En cambio, los robots zoomórficos caminadores multípedos son muy numeroso y están siendo experimentados en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, piloteando o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos robots serán interesante en el campo de la exploración espacial y en el estudio de los volcanes.
HÍBRIDOS
Estos robots corresponden a aquellos de difícil clasificación cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas, es al mismotiempo uno de los atributos de los robots móviles y de los robots zoomórficos. De igual forma pueden considerarse híbridos algunos robots formados por la yuxtaposición de un cuerpo formado por un carro móvil y de un brazo semejante al de los robots industriales.
En parecida situación se encuentran algunos robots antropomorfos y que no pueden clasificarse ni como móviles ni como androides, tal es el caso de los robots personales. Las CARACTERÍSTICAS con las que se clasifican principlamente Propósito o función Sistema de coordenadas empleado Número de grados de libertad del efecto formal Generación del sistema control.
CONTEXTO ACTUAL DE LA ROBOTICA:
En el contexto actual la noción de robótica implica una cierta idea preconcebida de una estructura mecánica universal capaz de adaptarse, como el hombre, a muy diversos tipos de acciones y en las que concurren, en mayor o menor grado según los casos, las características de movilidad, programación, autonomía y multifuncionalidad. Pero en sentido actual, abarca una amplia gama de dispositivos con muy diversos trazos físicos y funcionales asociados a la particular estructura mecánica de aquellos, a sus características operativas y al campo de aplicación para el que se han concebido. Es además evidente que todos estos factores están íntimamente relacionados, de tal forma que la configuración y el comportamiento de un robot condicionan su adecuación para un campo determinado de aplicaciones y viceversa, y ello a pesar de la versatibilidad inherente al propio concepto de robot.
LA CONSTRUCCIÓN DE UN ROBOT:
La construcción de un robot, ya sea una máquina que camine de forma parecida a como lo hace el ser humano, o un manipulador sin rostro para una línea de producción, es fundamentalmente un problema de control. Existen dos aspectos principales: mantener un movimiento preciso en condiciones que varían y conseguir que el robot ejecute una secuencia de operaciones previamente determinadas. Los avances en estos dos campos -el primero es esencialmente un problema matemático, y el segundo de tecnología - suministran la más grande contribución al desarrollo del robot moderno. Los manipuladores propiamente dichos representan, en efecto , el primer paso en la evolución de la robótica y se emplean preferentemente para la carga-descarga de máquinas-herramientas, así como para manutención de prensas, cintas transportadores y otros dispositivos.
Actualmente los manipuladores son brazos articulados con un número de grados de libertad que oscula entre dos y cinco; cuyos movimientos, de tipo secuenial, se programan mecánicamente o a través de una computadora. Los manipuladores no permiten la combinación simultánea de movimientos ni el posicionamiento coínuo de su efector terminal. A pesar de su concepción básicamente sencilla, se han desarrollado manipuladores complejos para adaptarlos a aplicaciones concretas en las que se dan condiciones de trabajo especialmente duras o especificaciones de seguridad muy exigentes.
Tres Leyes de la Robótica
1.-Un robot no puede actuar contra un ser humano o, mediante la inacción, que un ser humano sufra daños.  2.-Un robot debe de obedecer las ordenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.
2.-Un robot debe de obedecer las ordenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.3.-Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las dos primeras leyes.
Esta redacción de las leyes es la forma convencional en la que los humanos de las historias las enuncian; su forma real sería la de una serie de instrucciones equivalentes y mucho más complejas en el cerebro del robot.
Estas leyes surgen como medida de protección para los seres humanos. Según el propio Asimov, la concepción de las leyes de la robótica quería contrarrestar un supuesto "complejo de Frankenstein", es decir, un temor que el ser humano desarrollaría frente a unas máquinas que hipotéticamente pudieran rebelarse y alzarse contra sus creadores.
De intentar siquiera desobedecer una de las leyes, el cerebro positrónico del robot resultaría dañado irreversiblemente y el robot moriría.
Las tres leyes de la Robótica representan el codigo moral del robot. Un robot va a actuar siempre bajo los imperativos de sus tres leyes.



{kind=link}










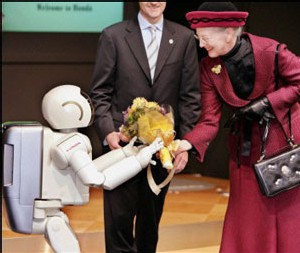
 Se trata del Repliee Q1, considerado uno de los mayores avances de la robótica en la actualidad y presentado en la Exposición Universal de Aichi en junio de 2005.
Se trata del Repliee Q1, considerado uno de los mayores avances de la robótica en la actualidad y presentado en la Exposición Universal de Aichi en junio de 2005. Uno de sus creadores, Hiroshi Ishiguri, miembro del equipo científico, asegura que el androide tendrá funciones similares al de los seres humanos y declara que "puede interactuar con la gente. Puede responder cuando la tocan. Es muy satisfactorio, aunque obviamente nos falta mucho trabajo todavía".
Uno de sus creadores, Hiroshi Ishiguri, miembro del equipo científico, asegura que el androide tendrá funciones similares al de los seres humanos y declara que "puede interactuar con la gente. Puede responder cuando la tocan. Es muy satisfactorio, aunque obviamente nos falta mucho trabajo todavía".


 Su sucesor tiene la apariencia de una mujer japonesa. Para programar su movimiento, un computador analizó los patrones de desplazamiento de un ser humano y los usó como molde para la manera de moverse de Repliee Q1.
Su sucesor tiene la apariencia de una mujer japonesa. Para programar su movimiento, un computador analizó los patrones de desplazamiento de un ser humano y los usó como molde para la manera de moverse de Repliee Q1. La robótica es la ciencia encaminada a diseñar y construir aparatos y sistemas capaces de realizar tareas propias de un ser humano.
La robótica es la ciencia encaminada a diseñar y construir aparatos y sistemas capaces de realizar tareas propias de un ser humano. Robótica de Exploración: Es la parte de la Ingenieria del Software que se encarga de desarrollar programas capaces de explorar documentos en busca de determinados contenidos. Existen diversos servicios en Internet dedicados a esta parcela de la robótica.
Robótica de Exploración: Es la parte de la Ingenieria del Software que se encarga de desarrollar programas capaces de explorar documentos en busca de determinados contenidos. Existen diversos servicios en Internet dedicados a esta parcela de la robótica. Bajo este grupo están los robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios *aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados* y estar estructurados para mover sus elementos terminales en un determinaado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad". En este grupo se encuentran los manipuladores, los robots industriales, los robots cartesianos y algunos robots industriales y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o deucir el espacio ocupado en el suelo.
Bajo este grupo están los robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios *aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados* y estar estructurados para mover sus elementos terminales en un determinaado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad". En este grupo se encuentran los manipuladores, los robots industriales, los robots cartesianos y algunos robots industriales y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o deucir el espacio ocupado en el suelo.

 2.-Un robot debe de obedecer las ordenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.
2.-Un robot debe de obedecer las ordenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.









 Por un lado, definir esta parte de la electricidad no es tan fácil y toda definición no es completa. Todos sabemos que esta parte de la física, trata de manipular a modo como se quiera el paso de la corriente eléctrica; ¿como lo hace?, estudiando el movimiento de los electrones dentro de los cuerpos semiconductores o conductores bajo ciertas condiciones. Por otro se puede decir que es el conjunto de conocimientos técnicos, tantos teóricos como prácticos que tiene por objetivo la aplicación de la tecnología electrónica para la resolución de problemas prácticos; pues bien, la electrónica es el campo de la ingeniería y de la física; relativa al diseño y aplicación en dispositivos.
Por un lado, definir esta parte de la electricidad no es tan fácil y toda definición no es completa. Todos sabemos que esta parte de la física, trata de manipular a modo como se quiera el paso de la corriente eléctrica; ¿como lo hace?, estudiando el movimiento de los electrones dentro de los cuerpos semiconductores o conductores bajo ciertas condiciones. Por otro se puede decir que es el conjunto de conocimientos técnicos, tantos teóricos como prácticos que tiene por objetivo la aplicación de la tecnología electrónica para la resolución de problemas prácticos; pues bien, la electrónica es el campo de la ingeniería y de la física; relativa al diseño y aplicación en dispositivos.  Además la carrera de ingeniería electrónica surge con la invención del telégrafo y con el comienzo de la utilización de las ondas de radio para las comunicaciones. A partir de entonces la electrónica fue y es una de las causas que han favorecido gran parte de las transformaciones científicas, tecnológicas y culturales de la humanidad.
Además la carrera de ingeniería electrónica surge con la invención del telégrafo y con el comienzo de la utilización de las ondas de radio para las comunicaciones. A partir de entonces la electrónica fue y es una de las causas que han favorecido gran parte de las transformaciones científicas, tecnológicas y culturales de la humanidad. 


 Ingeniería de componentes
Ingeniería de componentes